
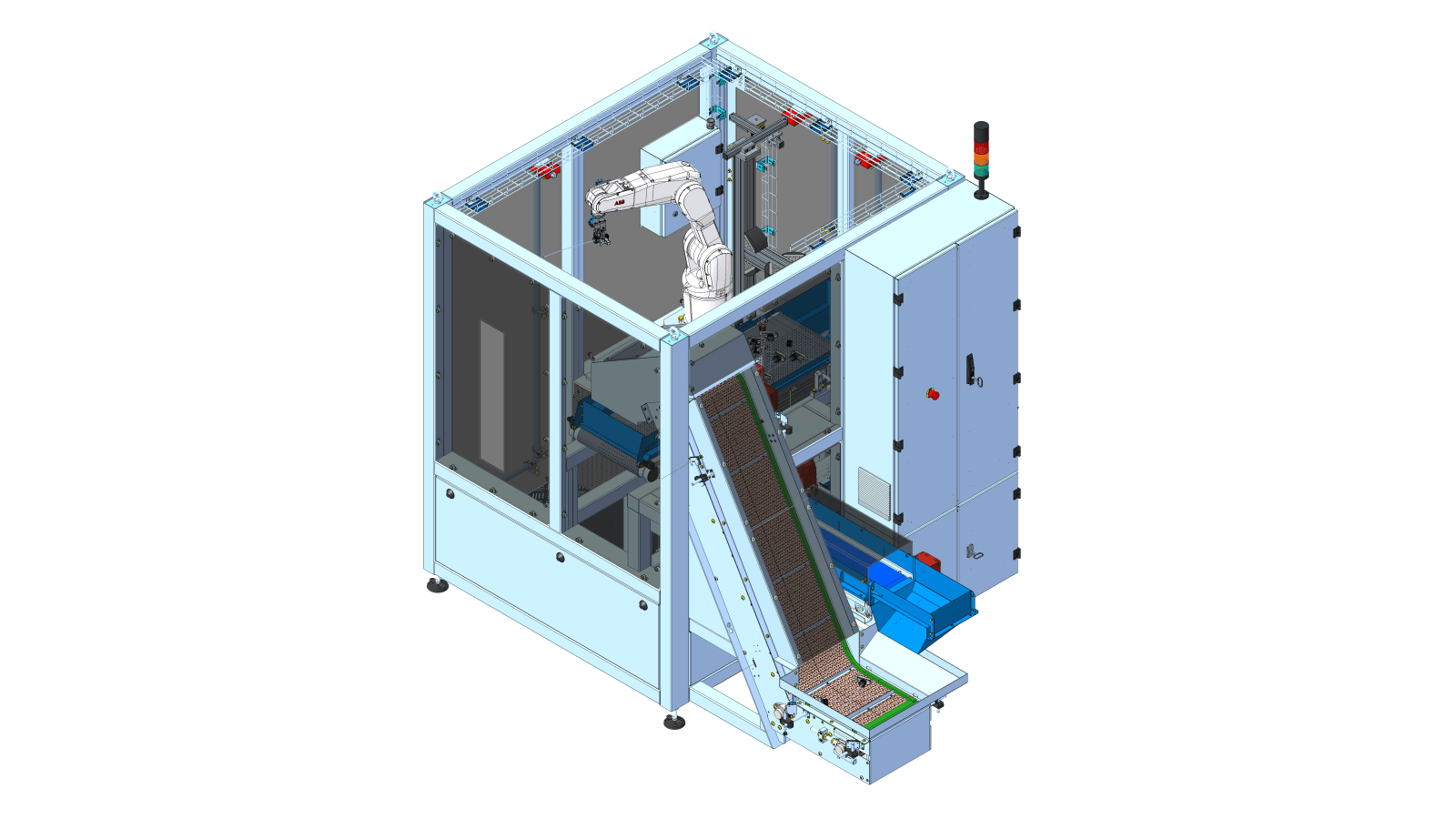
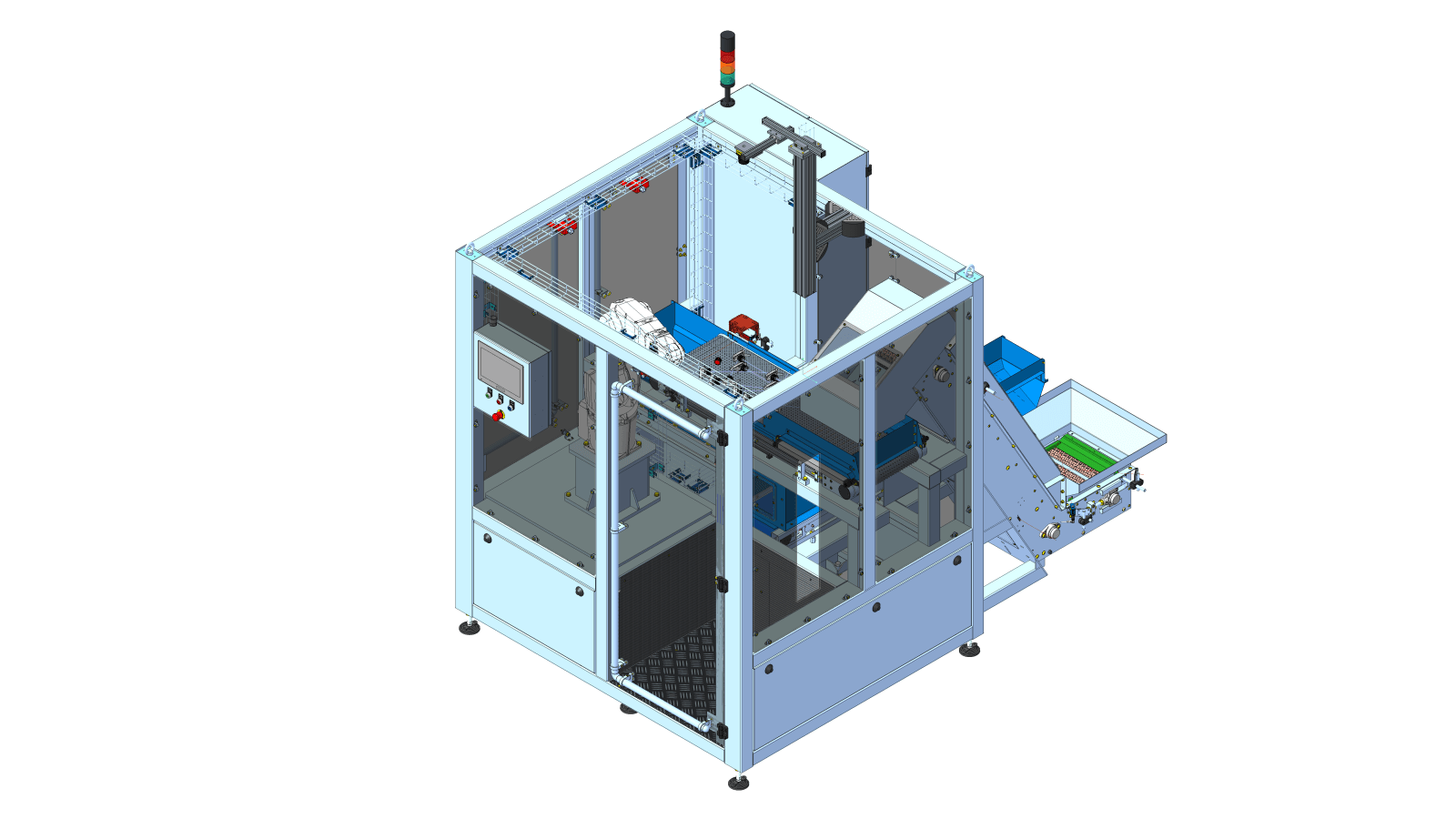
ROBOTIC STATION FOR CLOSURE SORTING
The fully robotic closure sorting station is based on a fully automatic closed-loop system. The operator’s task is only to fill the buffer tank with a system that can accommodate thousands of closures. After the initial sorting of the closures, they go under the vision system, where their position is verified on the conveyor belt, and then this position is transferred to the industrial robot. A robot equipped with an appropriate gripper takes the closure, orients it appropriately with or without rotation, and then applies it to the final stage of the process, i.e. to the capping machine’s conveyor. The system can handle many types of locks, including:
- atomizer
- pump
- trigger
- push-pull
- ordinary nut
- safety nut
- flip top
- disc top
- pipette
- other
The construction of the robotic station allows sorting most ergonomically. Packages that can be omitted or not picked up by the robot due to their incorrect position on the transport system or the inability to verify their return to the beginning of the process by working in a closed system.